Risk: Will it work?
Mitigation: Before you purchase a controller Douloi will correspond with you to clearly understand your application and its requirements. Douloi will then build an application prototype of the aspects that appear to have risk. This functional prototype can then be measured for computational and functional performance to demonstrate that the controller will work. A report is provided showing the measurements and describing the structure of the solution to serve as a starting point for further application development.
Risk: How do you know it works?
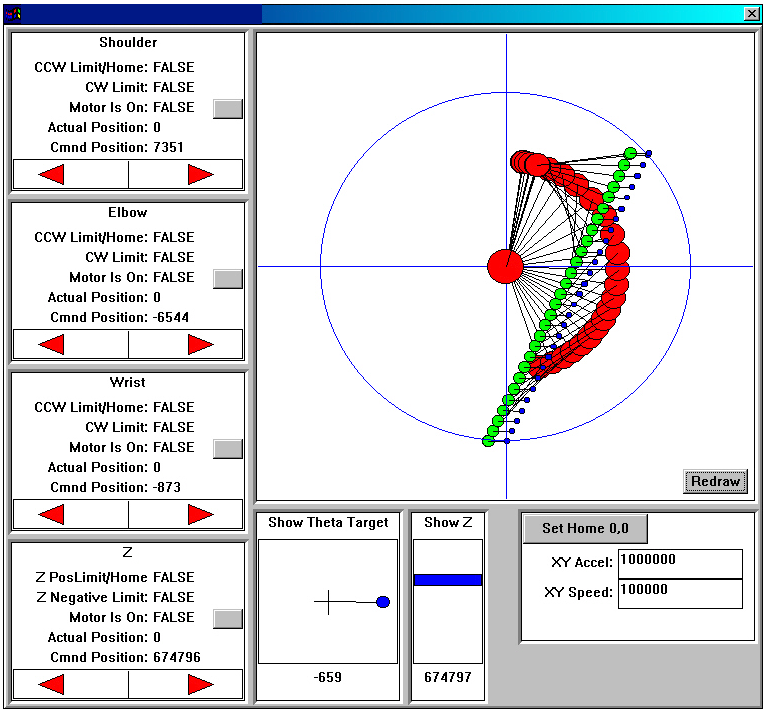
Mitigation: Douloi Controllers have the ability to run software instrumentation concurrently with the application program so that the performance of the machine can be measured during actual operation. These instruments can measure errors and trends allowing for a study of actual machine behavior.

Risk: Will the controller handle an unforeseen requirement?
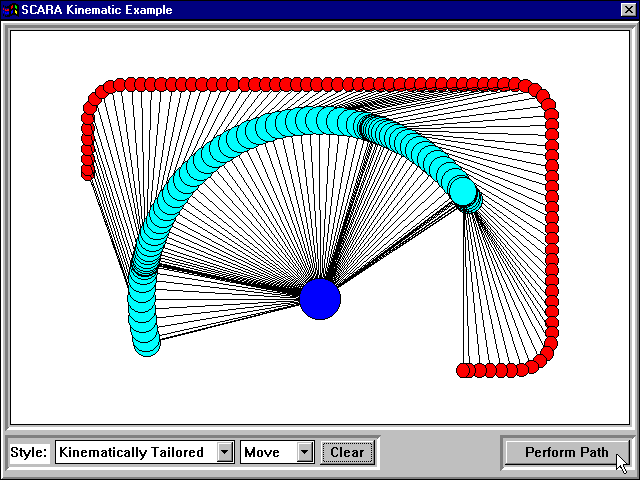
Mitigation: Unlike the slow command interpreters of many motion controllers, Douloi’s Servo Application Workbench compiles motion applications directly into resident object code programs providing uncompromised speed and predictable hard-real-time performance. Entire processes can execute every controller sample period enabling sample-rate kinematics and coordination tailoring to respond to new application specific requirements.
Risk: Steep Learning Curve
Mitigation: The Servo Application Workbench IDE provides graphical block programming as well as text based programming. Block programming enables the construction of applications with only mouse clicks eliminating obstacles to initial motion. Block programming includes rich control constructs for iteration, conditionals, and structured exception handling.

Get the Benefit without the Risk
